
MOVIMENTO CIRCULAR
Um corpo que descreve um movimento circular uniforme passa de tempo em tempo no mesmo ponto da trajetória, sempre com a mesma velocidade. Assim, podemos dizer que esse movimento é repetitivo, e pode ser chamado de movimento periódico. Nos movimentos periódicos existem dois conceitos muito importantes que são: frequência e período.
Período: é o tempo gasto para se completar um ciclo (T = 1/ f).
Ao observar a definição de período e de frequência podemos dizer que o período é o inverso da frequência.
As equações que determinam o movimento circular são as seguintes:
Posição angular: S = φ .R, onde R é o raio da circunferência.
Velocidade angular média: ωm = Δφ/Δt
Aceleração centrípeta: ac = v2/R, onde R é o raio da circunferência.
Força Centrípeta
Para que um móvel possa descrever o movimento circular uniforme é necessário que esteja atuando uma força sobre ele, de modo que faça com que ele mude de posição, pois se tal fato não ocorrer o móvel passaria a descrever um movimento retilíneo uniforme. Essa força tem o nome de força centrípeta, e matematicamente é descrita da seguinte forma:
Fc = m. ac Onde ac é a aceleração centrípeta, ac = v2/R. Substituindo na equação acima temos:
Fc = m. v2/R A força centrípeta é sempre direcionada para o centro da circunferência. No cotidiano existem alguns exemplos de força centrípeta como a secadora de roupas e os satélites que ficam em órbita circular em torno do centro da Terra.
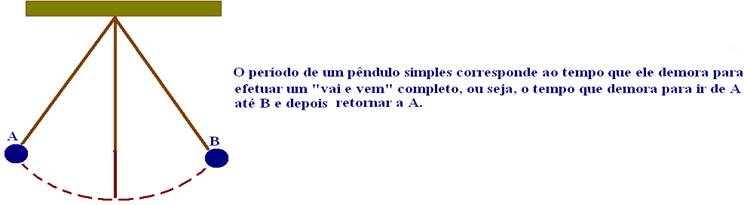
Quando o movimento é circular e uniforme, o tempo gasto pelo corpo para completar uma volta é constante e em intervalos de tempo iguais o móvel retorna à mesma posição com a mesma velocidade vetorial, o movimento é periódico. Exemplos:

Período (T) de um movimento circular uniforme (MCU) – definido como sendo o tempo que o móvel demora para efetuar uma volta completa (ciclo). Como o MCU é um movimento periódico, esse tempo é constante e representado pela letra (T).

Assim, por exemplo, o período do ponteiro das horas de um relógio é 12h, o dos minutos, 1h ou 60minutos e o dos segundos, 60 segundos. O período de rotação da Terra é de 24 horas, etc. Quando expressa no Sistema Internacional de Unidades (SI), o período deve ser medido em segundos (s).
![]() Freqüência (f) de um MCU – definida com sendo o número de voltas completas (ciclos) que um móvel ou ponto material efetua na unidade de tempo.
Freqüência (f) de um MCU – definida com sendo o número de voltas completas (ciclos) que um móvel ou ponto material efetua na unidade de tempo.
Assim, por exemplo, se a hélice de um ventilador está se movendo com freqüência de 6 ciclos por segundo, cada ponto dela está efetuando duas voltas completas por segundo.
![]() Unidades de frequência no SI – são normalmente usadas: (voltas)/s, ou (ciclos)/s, (oscilações)/s ou ainda (vibrações)/s, às quais denomina-se hertz, cujo símbolo é Hz
Unidades de frequência no SI – são normalmente usadas: (voltas)/s, ou (ciclos)/s, (oscilações)/s ou ainda (vibrações)/s, às quais denomina-se hertz, cujo símbolo é Hz
Utiliza-se também as unidades:

A freqüência (F) está relacionada com o período(T) por:

![]()
Velocidade escalar (V) de um MCU
![]() Para qualquer móvel em MCU, o espaço percorrido (ΔS) durante um período (Δt=T – tempo que demora para efetuar uma volta completa) será ΔS=2πR, onde R é o raio da circunferência.
Para qualquer móvel em MCU, o espaço percorrido (ΔS) durante um período (Δt=T – tempo que demora para efetuar uma volta completa) será ΔS=2πR, onde R é o raio da circunferência.
ΔS=2πR e Δt=T --- V= ΔS/Δt --- V=2πR/T

Velocidade angular (W) de um MCU
![]() Considere um móvel em MCU de modo que no instante to sua posição seja determinada pelo ângulo de fase φo e num outro instante t (t > to) pelo ângulo de fase φ.
Considere um móvel em MCU de modo que no instante to sua posição seja determinada pelo ângulo de fase φo e num outro instante t (t > to) pelo ângulo de fase φ.
Assim, observa-se que, no intervalo de tempo Δt=t – to, o raio que acompanha o móvel em seu movimento descreveu “varreu” um ângulo Δφ = φ – φo.
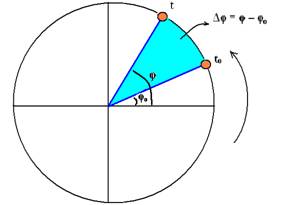
À razão entre o ângulo descrito pelo móvel em MCU e o tempo gasto para descrevê-lo dá-se o nome de velocidade angular (W) do corpo, ou seja:
![]()
Se o móvel efetuar uma volta completa, o ângulo descrito será Δφ = 2π rad = 360o e esse ângulo será descrito num tempo que é igual ao seu período T. Então:

Relação entre velocidade escalar (V) e angular (W)
![]() Na figura abaixo, tem-se:
Na figura abaixo, tem-se:
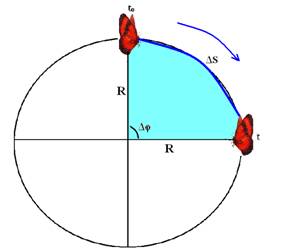
Δφ --- ângulo descrito entre Δt=t – to --- ΔS --- comprimento do arco --- Δφ= ΔS/R --- ΔS= Δφ.R --- esta relação só é válida se o ângulo Δφ estiver medido em radianos (rad) --- dividindo ambos os membros de ΔS= Δφ.R por Δt --- ΔS/Δt = Δφ/ Δt.R --- V=W.R
![]()
Acoplamento de polias e engrenagens
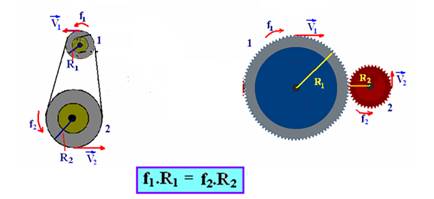
![]() Pode-se interligar duas ou mais polias através de uma correia (figura 1) ou acoplar duas ou mais engrenagens (figura 2)
Pode-se interligar duas ou mais polias através de uma correia (figura 1) ou acoplar duas ou mais engrenagens (figura 2)
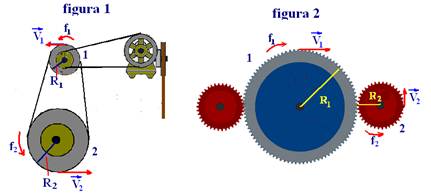
Todos os pontos da correia (admitidos inextensíveis) têm a mesma velocidade escalar V que todos os pontos da periferia de cada polia, desde que não ocorra deslizamento.
O mesmo ocorre com todos os dentes da polia engrenada, que tem a mesma velocidade escalar V.
Assim, V1=V2 --- W1.R1 = W2.R2 --- 2π/T1.R1= 2π/T2.R2 --- 2πf1.R1 = 2πf2.R2
![]()
O que você deve saber
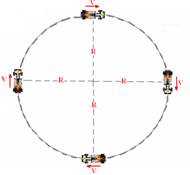
![]() Os dois carros A e B da figura mantêm-se lado a lado numa pista circular, no intervalo de tempo Δt. Seus raios nesse MCU
Os dois carros A e B da figura mantêm-se lado a lado numa pista circular, no intervalo de tempo Δt. Seus raios nesse MCU
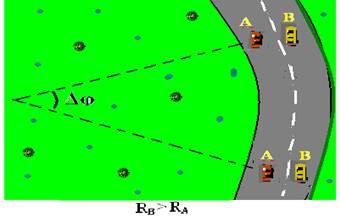
são, respectivamente, RA e RB.
O carro B terá maior velocidade (escalar, linear) V=ΔS/Δt, pois deverá percorrer maior distância ΔS para, no mesmo intervalo de tempo, poder acompanhar o carro A, ou seja,VA>VB. Mas, como “varrem” o mesmo ângulo (Δφ) no mesmo intervalo de tempo, suas velocidades angulares (W= Δφ/Δt) serão iguais, ou seja, WA=WB.
![]() O trator da figura abaixo mantém velocidade escalar constante V. Observe que cada ponto da periferia das rodas da frente e de trás, possuem a mesma velocidade que a do trator, ou seja, Vf=Vt=V.
O trator da figura abaixo mantém velocidade escalar constante V. Observe que cada ponto da periferia das rodas da frente e de trás, possuem a mesma velocidade que a do trator, ou seja, Vf=Vt=V.
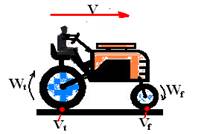
Mas, possuem velocidades angulares diferentes, pois W=2π/R e assim, W é inversamente proporcional a R, e como o raio da roda da frente é menor, ela gira mais que a maior tendo maior velocidade angular que a mesma --- Wf > Wt .
![]()
Bicicletas: Possuem coroas dentadas dianteiras (onde estão os pedais) unidas por uma corrente às coroas dentadas traseiras (ligadas ao eixo da roda traseira).

O número de voltas efetuadas pela roda traseira a cada pedalada, que corresponde a uma volta completa dos pedais da roda dentada dianteira, depende do tamanho relativo das coroas que estão ligadas pela corrente e obedecem à relação fd.Rd=ft.Rt, lembrando que a freqüência da roda dentada traseira (ft) é a mesma que a da roda traseira. Assim, se você quiser manter alta velocidade, você deve acionar a coroa dianteira de maior raio com a coroa traseira de menor raio e se você quiser fazer menos esforço numa subida íngreme, você deve acionar a coroa dianteira de menor raio com a coroa traseira de maior raio (veja que nesse caso a velocidade diminui)
Função horária do MCU
![]() Num MCU a velocidade angular (W) e a escalar (V) são sempre as mesmas em qualquer intervalo de tempo. Dividindo todos os termos da equação horária do movimento uniforme (S=So + V.t) pelo raio R da trajetória: S/R= So/R + Vt/R --- S/R=φ ---
Num MCU a velocidade angular (W) e a escalar (V) são sempre as mesmas em qualquer intervalo de tempo. Dividindo todos os termos da equação horária do movimento uniforme (S=So + V.t) pelo raio R da trajetória: S/R= So/R + Vt/R --- S/R=φ ---
So/R=φo --- V/R=W --- φ = φo + W.t
![]()
A equação acima recebe o nome de equação (função) horária do MCU na forma angular, e aos termos φ e φo dá-se o nome de fases (ou ângulos) final e inicial, respectivamente.
Movimento circular uniformemente variado (MCUV)
Na figura abaixo o golfinho está efetuando movimento circular uniformemente retardado na subida e uniformemente acelerado na descida, ou seja, trata-se de um movimento circular uniformemente variado de equações:
S = So + Vo.t + a.t22 --- dividindo por R --- S/R = So/R + (Vo.t)/R + (a/R).t2/2 --- ![]()
V= Vo + at --- V/R = Vo/R + (a/R).t --- ![]()
Torricelli --- V2 = Vo2 + 2.a,ΔS --- (V/R)2= (Vo/R)2 + 2.(a/R).Δφ --- ![]()
W=V/R --- λ=a/R --- Δφ = ΔS/R

at=a --- ac=V2/R